ФедераЛЬная служба
россиии по гидрометеорологии и
мониторингу окружающей
среды
Центральная
аэрологическая обсерватория
УДК 621.396.67
№ гос. регистрации
Инв. №
Директор
д. ф.-м. н., профессор
_______________ А. А. Черников
"_____"___________________ г.
Отчет
О НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЙ РАБОТЕ
" Обеспечить научное
сопровождение промышленного производства и ввода в эксплуатацию нового
аэрологического комплекса МАРЛ-А "
(Заключительный)
индекс 1.2.1.1
Ответственный исполнитель ____________________________ А. В. Кочин
Долгопрудный - 2004
список ИСПОЛНИТЕЛЕЙ
|
Ответственный исполнитель |
|
Кочин А. В. к.т.н. |
Введение, заключение |
|
Ответственный исполнитель |
|
Азаров А. С. к.т.н. |
Глава 1,2 |
|
Исполнитель |
|
Дубовецкий А. С. |
Глава 3 |
|
Исполнитель |
|
Лесков Р. В. |
Глава 4 |
РЕФЕРАТ
Отчет 35 с., 12 рис., 1 табл., 5 источников
МЕТЕОРОЛОГИЯ, аэрологическое зондирование атмосферы, радиолокационная станция слежения за аэрологическими шарами-зондами
Объект
исследования: Аэрологический радиолокатор.
Цель работы: Создание и освоение производства микроэлектронного аэрологического радиолокатора МАРЛ-А
Приводится
описание устройства, принципа действия и конструкции микроэлектронного аэрологического
радиолокатора МАРЛ-А. Подробно рассмотрены основные функциональные узлы и
подсистемы МАРЛ-А. Приведены результаты испытаний серийных образцов МАРЛ-А,
изготовленных Солнечногорским приборным заводом.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ……………………………………………………………………………………………………5
ГЛАВА 1. ОБЩИЕ СВЕДЕНИЯ О
РАДИОЛОКАТОРЕ МАРЛ-А……………………………………….6
1.1. Назначение
радиолокационной станции МАРЛ-А…………………………………………………6
1.2. Технические данные
МАРЛ-А………………………………………………………………………7
1.3. Структурная схема и
принцип действия МАРЛ-А…………………………………………………8
1.3.1.Обработка сигналов телеметрии и
дальности в ПЭВМ МАРЛ………………………………13
1.4. Дальность действия
РЛС…………………………………………………………………………….17
1.4.1. Дальность действия по
каналу запроса зонда…………………………………………………17
1.4.2. Дальность действия по
каналу приема сигнала зонда………………………………………..18
ГЛАВА 2.Разработка
перспективных алгоритмов обработки сигналов в приемном канале
МАРЛ-А……………………………………………………………………………………………………...19
2.1 Общая
схема обработки сигнала………………………………………………………………19
2.2
Устройство МАВ-ФАПЧ……………………………………………………………………….21
2.3
Обнаружение ответа радиозонда по дальности………………………………………………24
2.4 Оценка
периода телеметрии…………………………………………………………………...25
2.5. Выводы
и пути развития………………………………………………………………………26
ГЛАВА 3 . Модернизация программного обеспечения (ПО) МАРЛ-А………………………………...27
ГЛАВА 4.Разработка методики проверки работоспособности АФАР
радиолокатора МАРЛ-А……...30
заключение……………………………………………………………………………………………...32
список использованных
источников………………………………………………………..32
ВВЕДЕНИЕ
На
протяжении ряда лет Центральная аэрологическая обсерватория ведет разработку
новых радиолокационных систем для нужд метеорологических служб России.
Потребность в разработке и производстве этих средств на современной элементной
базе и принципах обработки сигналов определена Федеральной целевой программой
“Развитие системы гидрометеорологического обеспечения Российской Федерации в
1994-1996 годах и на период до 2000 года”, утвержденной Постановлением Правительства
РФ от 03.03.1995 г.
Радиолокационные станции аэрологического зондирования
предназначены для измерений параметров атмосферы (температуры, влажности) с
помощью аэрологических шаров-зондов с определением точных координат местонахождения
зонда (наклонной дальности или высоты, угла места и азимута) и определения по
ним скорости и направления ветра для нужд гидрометеорологической службы России
и ведомственных метеорологических служб.
Первым
образцом такой продукции стал разработанный в 1997 г. микроэлектронный аэрологический
радиотеодолит (МАРЛ-Т), опытный образец которого успешно прошел,
межведомственные приемочные испытания и был рекомендован для серийного
производства. Разработка МАРЛ-Т показала, что и на современном этапе развития
электроники в России могут быть созданы конкурентоспособные радиолокационные
системы, не уступающие зарубежным аналогам, и существенно превосходящие
находящиеся в эксплуатации в сети Росгидромета станции типа АВК-1 (табл.1).
Для того,
чтобы обеспечить возможность работы с серийно выпускаемыми для сети аэрологического
зондирования России и стран ближнего зарубежья радиозондами МАРЗ и МРЗ-3 было решено
разработать на базе МАРЛ-Т активную (в отличие от неизлучающего радиотеодолита)
радиолокационную станцию, получившую обозначение МАРЛ-А.
Станция МАРЛ-А отличается
принципиально новым подходом к конструированию подобных комплексов. Это
выражается в построении станции в виде одноблочной конструкции с максимальным
упрощением механических и сборочных работ при производстве и исключением из
производственного цикла работ по
изготовлению точной механики для системы сопровождения радиозонда.
Использование современных микроэлектронных и цифровых технологий, характерных
для военной электроники, и тщательно продуманные конструктивные решения
позволили создать полностью автоматизированную и не требующую
технического обслуживания
высококвалифицированным персоналом систему радиозондирования, способную
работать в любых климатических условиях.
Таблица 1
|
|
|
Тип оборудования, изготовитель |
||||
|
№ |
Характеристика |
АВК-1 УПП “Вектор” Россия |
AIR-3A-RT2 AIR inc, США |
RT-20 Vaisala, Финляндия |
МАРЛ-Т МИЭТ,СЭМЗ Россия |
МАРЛ-А МИЭТ, СЭМЗ Россия |
|
1 |
Тип системы |
Радиолокационная |
Радиотеодолитная |
Радиотеодо- литная |
Радиотеодо-литная |
Радиолокационная |
|
2 |
Период разработки, годы |
1975-1985 |
1982-1986 |
1991-1993 |
1991-1997 |
1998-2001 |
|
3 |
Масса, кг |
3300 |
170 |
113 |
150 |
150 |
|
4 |
Потребляемая мощность
(кВт) |
10 |
0,1 |
0,3 |
0,3 |
0,2 |
|
5 |
Электропитание |
~220 В, 3 фазы |
~220 В |
~220 В |
~220 В |
~220 В |
|
6 |
Система бесперебойного питания |
нет |
есть |
есть |
есть |
есть |
|
7 |
Требуемая площадь
помещения, кв. м |
45, здание по спец. проекту |
6 |
6 |
6 |
6 |
|
8 |
Наработка на отказ, час |
150 |
неизвестно |
неизвестно |
2000 |
2000 |
|
9 |
Рабочая частота, МГц |
1790 |
1680 |
|
1680 |
1680 |
|
10 |
Среднеквадратические Ошибки измерения: |
|
|
|
|
|
|
|
- дальности, м |
45 |
- |
- |
- |
30 |
|
|
- угла места, град. |
0,18 |
0,15 |
0,15 |
0,1 |
0,1 |
|
|
- азимута, град. |
0,18 |
0,2 |
0,15 |
0,1 |
0,1 |
|
11 |
Наличие электровакуумных
приборов |
есть |
нет |
нет |
нет |
нет |
|
12 |
Сохраняемость первичных
данных зондирования |
нет |
да |
да |
да |
да |
|
13 |
Характеристики антенной
системы: |
|
|
|
|
|
|
|
- тип |
зеркальная |
пассивная АР |
пассивная АР |
АФАР |
АФАР |
|
|
- сканирование по азимуту |
электромеханическое |
электромеханическое |
электромеханическое |
электронное + электромеханическое |
электронное + электромеханическое |
|
|
- сканирование по углу места |
электромеханическое |
электромеханическое |
электромеханическое |
электронное |
электронное |
ГЛАВА 1. ОБЩИЕ СВЕДЕНИЯ О РАДИОЛОКАТОРЕ МАРЛ-А
1.1.
Назначение радиолокационной станции МАРЛ-А
Микроэлектронный аэрологический радиолокатор (МАРЛ-А)
предназначен для выполнения совместно с радиозондом комплексного зондирования
атмосферы. Выпускаемый в свободный полет радиозонд измеряет в точке пролета
температуру и влажность атмосферы и по каналу радиосвязи передает эти параметры
на радиолокационную станцию слежения МАРЛ-А. Станция МАРЛ-А производит
автоматический поиск и сопровождение зонда в полете с выдачей его текущих
координат, прием и обработку метеорологической информации.
С помощью
МАРЛ-А осуществляются также предполетная проверка радиозонда с представлением
результатов на мониторе ЭВМ оператора.
1.2. Технические
данные МАРЛ-А
Дальность автоматического
сопровождения зонда: от 100 м до 200 км; высота комплексного зондирования до 40
км.
В качестве
антенны используется активная фазированная антенная решетка (АФАР) .
Пределы
поворота диаграммы направленности антенны (ДН):
- в
горизонтальной плоскости ±360° (механический поворот) и электронное
сканирование в секторе ±25°;
- в
вертикальной плоскости электронное сканирование в секторе -10°¸100°.
Максимальная
скорость механического поворота АФАР 60 град/с.
Ширина ДН
АФАР:
- в
горизонтальной плоскости не более 9°,
- в
вертикальной плоскости не более 6°.
Мощность
передающей части АФАР в импульсе 115 Вт, длительность импульса 0,5 мкс в
ближней зоне и 1¸1,1 мкс в
дальней зоне.
Коэффициент
шума приемной части АФАР (вместе с последующим приемным трактом) 3,7 дБ (2,35
раза).
Среднеквадратические
значения ошибок измерения координат зонда:
- дальности
не более 30 м;
- по
угловым координатам не более 0,1°.
Абсолютная
погрешность измерения телеметрической информации (погрешность измерения периода
частотной манипуляции сигнала зонда) не более 1 мкс.
МАРЛ-А
обеспечивает сопровождение радиозонда при следующих условиях:
- скорости
подъема зонда до 12 м/с;
- скорости
падения зонда до 125 м/с.
- скорости
горизонтального перемещения зонда у земной поверхности до 35 м/с и на высотах
более 10 км – до 150 м/с.
Система
индикации и управления радиолокатором включает в себя персональный компьютер
(ПК) оператора (информация о режимах работы, координатах зонда, исправности
аппаратуры). Предусмотрен режим функционального контроля радиолокатора с
использованием имитатора радиозонда.
Электропитание
МАРЛ-А: сеть 220 В, 50 Гц (потребляемая мощность в среднем не более 150 Вт,
пиковая нагрузка до 500 Вт). Аварийное питание – от стандартного источника
бесперебойного питания мощностью 600 Вт (UPS-600).
1.3. Структурная схема и принцип действия МАРЛ-А
Система
зондирования атмосферы состоит из радиолокатора МАРЛ-А и радиозонда МРЗ-3,
привязанного к наполненному водородом шару (находящемуся в свободном полете).
Зонд излучает импульсно модулированный сигнал. Несущая частота 1672 МГц£ fЗ£ 1688 МГц, длительность импульса примерно равна 0,6
мкс, среднее значение периода следования импульсов составляет Тсл.з »1,25 мкс (среднее значение
частоты следования импульсов fсл.ср» 800 кГц). Принимая сигнал
радиозонда моноимпульсной антенной, можно измерять его текущие угловые
координаты. Для измерения дальности зонда в состав МАРЛ-А включен передатчик
запросного сигнала. Когда запросный импульс достигает зонда, в сигнале
последнего возникает пауза длительностью Тсл.з, т.е. пропускается
один импульс. Определяя задержку этой паузы tз относительно импульса передатчика РЛС, можно получить
текущую дальность зонда R
![]() ,
,
где С – скорость распространения радиоволн.
Информация о температуре и влажности атмосферы в месте,
где находится зонд, передается с использованием манипуляции частоты следования
импульсов зонда fсл.з. Частота fсл.з поочередно принимает два значения fсл.1 и fсл.2 (рис.1). В величине периода манипуляции Т поочередно
кодируются значения температуры и влажности воздуха. Демодуляция сигнала зонда
в РЛС позволяет определить значения Т и Т1, которые в виде чисел
поступают в ПК оператора, где производится расчет метеопараметров атмосферы.
Рис.1. Закон манипуляции
частоты следования импульсов зонда
Отметим еще одну функцию
радиолокатора. Поскольку возможные отклонения несущей частоты сигнала зонда от
номинала (±8 МГц)
выходят далеко за пределы полосы пропускания приемника РЛС, последний
автоматически настраивается на частоту принимаемого сигнала. Одновременно подстраивается
и несущая частота сигнала передатчика РЛС, с тем, чтобы она не отличалась
заметно от частоты сигнала зонда.
Структурная схема радиолокационной станции представлена
на рис.2. Поясним назначение отдельных частей. В формирователе частот (ФЧ)
генерируется напряжение первого гетеродина приемника (несущая частота fг1 = 1480 МГц + d, где d - отклонение частоты
сигнала зонда от номинала 1680 МГц) и импульсы с частотой передатчика (несущая
частота fп = 1680 МГц
+ d).
Рис.2. Структурная схема МАРЛ-А
Блок ФЧ
также содержит входную часть приемного тракта, состоящую из малошумящего
усилителя (МШУ) и смесителя. На вход МШУ поступает принятый сигнал зонда из
АФАР, а выходное напряжение смесителя на промежуточной частоте 200 МГц подается
в приемное устройство.
Сформированный СВЧ импульс из блока ФЧ подается в АФАР,
где этот импульс усиливается и через циркулятор подается в модули АФАР.
Активная фазированная антенная решетка содержит 64
приемо-передающих модуля и такое же количество сдвоенных дипольных излучателей.
Пассивная часть антенны (сумматоры-делители, фазовращатели и излучатели)
являются общими для передающей и приемной частей АФАР. Напряжение возбуждения
АФАР разветвляется с помощью сумматоров-делителей на 64 канала, в которых
напряжения фазируются и поступают через переключатели
"прием-передача" в передающие части модулей. В последних
осуществляется усиление напряжений до мощности не менее 2 Вт в импульсе и подача
импульсов через ключи "прием-передача" на излучатели. Управление
лучом АФАР в вертикальной плоскости осуществляется путем формирования нужного
фазового распределения поля в раскрыве антенны. Нормаль к решетке образует угол
30° с
горизонтом. Отклонение луча от нормали в вертикальной плоскости может
составлять (-40°¸ +70°), т.е. (-10°¸ +100°) относительно горизонта.
Управление лучом АФАР в горизонтальной плоскости
выполняется двояко: электронное управление путем регулировки фазового
распределения поля в раскрыве и механическое управление с помощью
электропривода. Сектор электронного сканирования составляет не менее ±25°; сектор механического
поворота ±210°.
При измерении азимута зонда необходимо учитывать угол
механического поворота АФАР - bмех. Информация
об этой величине вводится в ПЭВМ с датчика "угол-код", имеющегося в
механическом приводе.
Управление фазовым распределением в АФАР осуществляется с
помощью 4-разрядных дискретных фазовращателей. Управляемыми элементами
фазовращателей являются pin-диоды.
Принятые вибраторами АФАР сигналы зонда проходят через
открытые ключи защиты в приемных частях модулей, усиливаются в малошумящих
усилителях (МШУ), фазируются и поступают на устройство суммирования. На выходе
последнего образуются 4 сигнала, соответствующие четырем подрешеткам АФАР
(рис.3).
Измерение угловых координат выполняется методом
квадрантного сканирования. При этом ДН АФАР периодически занимает одно из
четырех положений: луч отклоняется на половину ширины ДН вверх, влево, вниз,
вправо и т.д. Указанные ДН пересекаются вдоль равносигнальной линии (РСЛ).
Смещение зонда с РСЛ приводит к амплитудной модуляции принятого сигнала с
частотой сканирования. Глубина модуляции пропорциональна текущей угловой
ошибке, а фаза модуляции соответствует направлению смещения зонда с РСЛ.
Квадрантное сканирование осуществляется путем фазовой
манипуляции четырех выходных напряжений АФАР по законам, представленным на
рис.3.
Рис.3.
Измерение угловых координат радиозонда
с использованием
квадрантного сканирования
а) Функциональная схема
б)Управляющие напряжения
фазовращателей
в) Опорные
напряжения фазовых детекторов
Фазовые
сдвиги реализуются с помощью фазовращателей 0, p/2, управляемых двоичными
числами. Управляющему числу ui=0
соответствует сдвиг фазы ji=0; если ui=1, ji=p/2. Из этих управляющих чисел формируются опорные
напряжения (рис.3), поступающие на два фазовых детектора. На другие входы
фазовых детекторов подается огибающая принятого сигнала с выхода приемника (на
частоте сканирования) (рис.3), полученная путем амплитудного детектирования
сигнала. На выходах фазовых детекторов получаются напряжения, пропорциональные
угловым ошибкам в двух ортогональных плоскостях. Напряжения оцифровываются и
поступают в микро-ЭВМ, где корректируются числа, управляющие фазовращателями
АФАР таким образом, чтобы перемещением равносигнальной линии ликвидировать
угловые ошибки. При этом в микро-ЭВМ вырабатываются числа, соответствующие
текущим угловым координатам зонда b и e.
Для исключения потерь (3 дБ) в моменты излучения
зондирующего сигнала и приема ответной реакции зонда квадрантное сканирование
выключается путем обнуления фазовращателей, представленных на рис.3.
В приемом устройстве радиолокатора супергетеродинного типа используется промежуточная частота 200 МГц и линейно-логарифмическим УПЧ. На выходах приемного устройства формируются два напряжения:
- огибающая напряжения на частоте 800 кГц,
- огибающая напряжения на частоте квадрантного сканирования.
Первое
напряжение (импульсы с частотой 800 кГц) поступает в дальномер и устройство выделения
телеметрической информации находящиеся в ПЭВМ оператора.
Напряжение на частоте 800 кГц поступает также на устройство
первичной обработки телеметрической информации, которая периодически передается
в следующем порядке: опорный канал – температура – влажность – температура –
опорный канал и т.д.
Задачи первичной обработки:
-
выделить канальные интервалы;
-
измерить периоды частотной манипуляции, несущие
информацию о температуре и влажности;
-
измерить длительности интервалов с максимальной
частотой следования импульсов для опознавания опорного канала (рис.1).
Сигнал зонда "800 кГц", продетектированный в
приемнике, фильтруется на входе устройства цифровой обработки (УЦО). Полоса
фильтра - 100 кГц. Компаратор преобразует сигнал в цифровой. Низкочастотный
сигнал, соответствующий закону частотной манипуляции частоты "800
кГц", выделяется схемой фазовой
автоподстройки частоты (ФАПЧ). Генератор управляющего напряжения (ГУН)
УЦО подстраивается по сигналу зонда "800 кГц" напряжением с выхода
фазового детектора. Напряжение на выходе фазового детектора, отфильтрованное
ФНЧ, - это низкочастотная огибающая частотной манипуляции сигнала зонда
подается на ПЭВМ в канал измерения телеметрии .
Второе напряжение на частоте
сканирования поступает на два фазовых детектора, на выходах которых образуются
напряжения рассогласования (напряжения, пропорциональные текущим угловым
ошибкам).
1.3.1 Обработка сигналов телеметрии и дальности в ПЭВМ МАРЛ
В существующих системах радиозондирования типа МАРЗ-АВК для обработки сигналов телеметрии зонда используются алгоритмы оценки периода, основанные на подсчете количества счетных импульсов образцового генератора за период с последующим осреднением полученных значений за большой интервал времени. Данный алгоритм достаточно просто реализуется, но имеет множество недостатков. Среди самых существенных недостатков – низкая устойчивость к импульсным помехам, невозможность прямой оценки качества сигнала по результатам его обработки и принципиальная временная дискретность. В программном обеспечении МАЛР для обработки сигналов телеметрии зонда используется модифицированный метод автокорреляционного анализа импульсного сигнала. Метод позволил сделать процесс обработки непрерывным, повысить суммарную помехоустойчивость телеметрического канала на 8-10 дБ, проводить прямую оценку уровня и качества сигнала. При разработке метода были решены проблемы ускоренного расчета автокорреляционной функции сигнала и ее параметров путем использованием априорных данных о ее виде. Используемый метод позволил снизить на порядок общие ресурсные затраты в вычислительной системе по сравнению с прямым расчетом автокорреляции.
Основной задачей решаемой при обработке телеметрических сигналов радиозонда является задача оценки его периода. Сигналы телеметрии, поступающие с зонда, представляет собой бинарную последовательность импульсов приблизительно равной длительности, следующих с определенной частотой. В идеальном случае, импульсы можно принять как единичный уровень, промежутки между ними как нулевой (Рис.4)
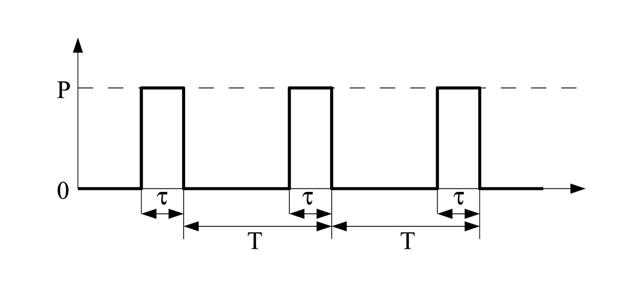
Рис.4
В реальных условиях приема в сигнале присутствует шум, который вызывает дополнительные единичные переходы в бинарной сигнальной последовательности.
В описанных выше условиях оценка периода между импульсами должна быть максимально стабильной и достоверной. В дополнение для некоторых приложений (например, в зондах МРЗ-3) необходимо оценивать и длительность самих импульсов.
Алгоритм, решающий поставленные задачи основан на анализе автокорреляционной функции поступающего на вход сигнала. Сама функция рассчитывается по формуле;
 .
.
Для нашего случая дискретной выборки;
![]() , (1)
, (1)
здесь число ![]() характеризует
временное окно, сигнал в котором влияет на формирование коррелограммы. Для исключения
краевых эффектов окно должно быть в
несколько раз больше чем максимально измеряемый период.
характеризует
временное окно, сигнал в котором влияет на формирование коррелограммы. Для исключения
краевых эффектов окно должно быть в
несколько раз больше чем максимально измеряемый период.
В идеальных условиях (при отсутствии шума) коррелограмма имеет следующий вид (Рис.5).
Рис.5
На рисунке длительность импульсов обозначена через t а период между импульсами через T. По вертикали отложена мощность, по горизонтали аргумент функции автокорреляции.
Из рисунка видно , что зная вид автокорреляционной функции , можно оценить период следования импульсов и их длительность.
Вычисление
автокорреляционной функции по формуле (1) требует для расчета коррелограммы из n элементов ![]() умножений и сложений.
При больших разбросах значений периодов, подлежащих измерению, это число может
быть весьма заметным. Так, при разбросе периодов от 2 мс. до 50 мс., и при периоде выборки в 0.050 мс. необходимая длина
коррелограммы (параметр n) составляет более 1000 элементов.
А параметр a, который определяет длину во времени
анализируемого сигнала, нужно взять еще в несколько раз больше. Таким образом,
количество операций исчисляется миллионами, что даже для современных
вычислительных средств является солидной цифрой, особенно если учесть
необходимость анализа в реальном масштабе времени.
умножений и сложений.
При больших разбросах значений периодов, подлежащих измерению, это число может
быть весьма заметным. Так, при разбросе периодов от 2 мс. до 50 мс., и при периоде выборки в 0.050 мс. необходимая длина
коррелограммы (параметр n) составляет более 1000 элементов.
А параметр a, который определяет длину во времени
анализируемого сигнала, нужно взять еще в несколько раз больше. Таким образом,
количество операций исчисляется миллионами, что даже для современных
вычислительных средств является солидной цифрой, особенно если учесть
необходимость анализа в реальном масштабе времени.
Предлагаемый алгоритм позволяет значительно сократить требуемое количество операций за счет отбрасывания ненужных частей коррелограммы, таких как промежуток между нулевым и первым пиком, а также вся коррелограмма после первого пика.
Первым шагом алгоритма
является необходимость оценки мощности полезного сигнала P и длительности импульсов ![]() . Для этого рассчитываются первые несколько значений функции
автокорреляции за исключением нулевого.
Значение функции автокорреляции при нулевом аргументе наиболее сильно
подвержено влиянию шумов, поэтому оно отбрасывается. Полученные значения
приближаются линейной функцией по методу наименьших квадратов. Полученная
приближающая функция принимается за фронт спада нулевого пика ( Рис .5). По её пересечению с горизонтальной осью
оценивается длительность импульса, а по пересечению с вертикальной осью
оценивается значение мощности полезного сигнала.
. Для этого рассчитываются первые несколько значений функции
автокорреляции за исключением нулевого.
Значение функции автокорреляции при нулевом аргументе наиболее сильно
подвержено влиянию шумов, поэтому оно отбрасывается. Полученные значения
приближаются линейной функцией по методу наименьших квадратов. Полученная
приближающая функция принимается за фронт спада нулевого пика ( Рис .5). По её пересечению с горизонтальной осью
оценивается длительность импульса, а по пересечению с вертикальной осью
оценивается значение мощности полезного сигнала.
Во втором шаге
оценивается период следования импульсов. Имея мощность P и длительность импульса ![]() можно оценить сверху и
снизу значение периода. Если имеется последовательность единичных импульсов, то
период можно оценить как:
можно оценить сверху и
снизу значение периода. Если имеется последовательность единичных импульсов, то
период можно оценить как:
 , (2)
, (2)
где ![]() - период выборки
сигнала. В формуле ( 2)
- период выборки
сигнала. В формуле ( 2) ![]() есть число импульсов.
Действительно, очевидно можно заметить ,что
есть число импульсов.
Действительно, очевидно можно заметить ,что ![]() есть мощность одного
импульса.
есть мощность одного
импульса.
Таким образом, теперь мы
имеем область, где имеет смысл искать первый пик. В этой области ищется
значение функции автокорреляции сравнимое с ![]() . Вокруг найденного значения в окрестности радиуса порядка
. Вокруг найденного значения в окрестности радиуса порядка ![]() вычисляется центр
тяжести фигуры, описываемой автокорреляционной функцией. Центр тяжести
вычисляется по стандартной формуле:
вычисляется центр
тяжести фигуры, описываемой автокорреляционной функцией. Центр тяжести
вычисляется по стандартной формуле:
 .
.
Значение периода принимается равным положению центра тяжести.
Необходимо отметить, что
оценки параметров ![]() используемых в
алгоритме становится точнее при уменьшении периода выборки
используемых в
алгоритме становится точнее при уменьшении периода выборки ![]() , что соответствует увеличению детализации коррелограммы.
, что соответствует увеличению детализации коррелограммы.
Технологически ввод сигналов телеметрии (напряжение с ФНЧ ФАПЧ 800 кГц. на плате предварительной обработки) производится через один из цифровых входов специализированной платы цифрового ввода CAO-02, установленной в ПЭВМ поста оператора МАРЛ-А.
Канал дальности
в системе МАРЛ реализован в цифровом виде с использованием ЦСП (Цифрового
Сигнального Процессора). На вход 12-ти
разрядного АЦП с частотой выборки 3 МГц ,связанного с ЦСП, поступает сигнал зонда на промежуточной
частоте 800 кГц, предварительно прошедший через аналоговый ФНЧ Батерворта
второго порядка с частотой среза 450 кГц. Такой фильтрацией достигается
ослабление несущественных частот выше 800 кГц, уменьшение эффектов случайной временной
синхронизации несущей 800 кГц. и частоты выборки АЦП, подавление частот выше частоты
Найквиста. Далее сигнал оцифровывается и поступает в цифровой интегратор,
реализованный программно в ЦСП, где накапливается для дальнейшей обработки.
Накопление необработанного сигнала производится с целью уменьшения количества
операций в основной программе ЦСП т.к. алгоритмы обработки линейны и допускает
такую перестановку операций.
В основе выделения ответной паузы зонда лежат два типа корреляционных обнаружителей, используемых соответственно, когда зонд находится в ближней и дальней зоне. В ближней зоне в качестве обнаруживающей функции используется свёртка сигнала с специально подобранным прототипом обнаруживаемого сигнала, который позволяет ослабить влияние местных предметов на определение положения зонда (оптимальный некогерентный обнаружитель). В дальней зоне в качестве обнаружителя используется вайвлет (всплеск) Морле, позволяющий выделять слабую паузу на фоне остатков несущей частоты 800 кГц. и помех.
Обнаружение
паузы производится в регулируемом окне дальности от 40 м до 10 км, центр
которого позиционируется исходя из
инерциального линейного предсказания значения удаления зонда. После
получения значения дальности производятся дополнительные проверки достоверности
ее значения и прогноз положения центра окна.
Реализованная
схема работы канала дальности позволяет, как увеличить чувствительность системы
и качество работы при небольших значениях
мощности запросного сигнала передатчика МАРЛ, так и позволяет
контролировать достоверность и устойчивость получаемых оценок дальности на
больших удалениях зонда от станции.
1.4.1.
Дальность действия по каналу запроса зонда.
Плотность
потока мощности зондирующего сигнала на расстоянии R от РЛС равна
![]() ,
,
где Рп – мощность
передающей АФАР, Gп – коэффициент усиления АФАР.
Мощность передатчика РЛС равна
![]() ,
,
где N – число модулей, p1 – мощность
одного модуля.
Коэффициент усиления ![]() , где g1 –
коэффициент усиления сдвоенного излучателя.
, где g1 –
коэффициент усиления сдвоенного излучателя.
В АФАР радиолокатора МАРЛ-А N
= 64, p1 = 1,8 Вт, g1 = 8 (в
максимуме). Следовательно, Рп =
64× 1,8 =
115,2 Вт; Gп max = 64×8 = 512.
Таким образом,
![]()
Практика показывает, что в подавляющем большинстве
случаев зонд формирует ответную реакцию при П1³ 10-7
Вт/м. Следовательно, ![]() км.
км.
В худшем случае, когда зонд падает на земную поверхность,
величина g1 уменьшается примерно на 30%, и ответная реакция зонда
существует на дальности до 177 км. Это можно считать вполне допустимым,
поскольку точки падения большей части выпускаемых зондов значительно не
достигают 200 км.
1.4.2.
Дальность действия по каналу приема сигнала зонда.
В
соответствии с ТУ на зонд МРЗ плотность потока мощности его передатчика на
расстоянии 2 м не менее 1,5×10-3
Вт/м2. Следовательно, плотность потока мощности на расстоянии 200 км
составит
 Вт/м2.
Вт/м2.
Эффективный
раскрыв АФАР
![]() м2.
м2.
Потери обработки сигнала в приемнике и последующих
устройствах можно принять равными 5 дБ, т.е. коэффициент потерь h »0,3.
Следовательно, принятый сигнал зонда на расстоянии 200 км составит
![]() Вт.
Вт.
Определим мощность шума приемника в полосе 2×106
Гц, приведенную к его входу. Рассчитанное значение коэффициента шума приемника
(с учетом входных цепей, МШУ в модулях АФАР и последующих устройств) примерно
равно 3,7 дБ, т.е. 2,35 в относительных единицах. Мощность шума
![]()
Отношение сигнал/шум на
дальности 200 км равно
![]() дБ,
дБ,
что, как показывает
практика, вполне достаточно для устойчивого сопровождения зонда по угловым
координатам, дальности и частоте.
ГЛАВА 2.Разработка
перспективных алгоритмов обработки сигналов в приемном канале
МАРЛ-А
2.1 Общая
схема обработки сигнала
Обработка
сигнала телеметрии радиозонда представляет собой трёхэтапный процесс:
1.
Фильтрация НЧ фильтром высших гармоник поднесущей
частоты телеметрии (с целью исключения их из последующей обработки).
2.
Демодулирование последовательности импульсов
телеметрии закодированной ЧМ.
3.
Измерение длительности импульсов телеметрии и периода
их следования.
Известно, что синтез оптимального, в смысле максимума априорной вероятности, демодулятора ЧМ, при некоторых приближениях, приводит к схеме фазовой автоподстройки частоты (ФАПЧ). Эта связь подробно раскрыта в [1]. Однако встаёт вопрос выбора конкретного устройства ФАПЧ. Большинство систем цифровых ФАПЧ разрабатываются для целей синхронизации в системах связи и работают при достаточно больших соотношениях сигнал/шум. В ситуации обработки сигналов в приемном канале МАРЛ-А определяющее значение имеет помехоустойчивость при сохранении приемлемой точности оценки. Таким образом, готовые решения оказываются не наилучшим выбором.
При
использовании в качестве в
микропроцессора обрабатывающего сигнал в “МАРЛ” ЦСП с достаточно большой
вычислительной мощность представляется возможным использование оптимальных
алгоритмов нелинейной оценки параметров, основанных на критерии максимальной
апостериорной вероятности (МАВ). МАВ-ФАПЧ обладает такими полезными нам свойствами,
как высокая помехоустойчивость и несмещённая оценка фазы, которую можно использовать
далее для обнаружения ответа зонда по дальности.
На выходе
МАВ-ФАПЧ получаем последовательность
импульсов (Рис .4). Так как период следования импульсов может меняться в
очень широких пределах, то повторное применение ФАПЧ для оценки значений периода
- затруднительно. Кроме того, требуется
оценивать ширину самих импульсов, для чего ФАПЧ - непригодна.
Выходом в
этой ситуации представляется использование автокорреляционного анализа. При
наличии периодично следующих импульсов коррелограмма будет выглядеть, как
последовательность пиков с расстоянием между ними равным периоду следования
импульсов (Рис.5 ). Ширина пиков в коррелограмме
соответствует ширине импульсов.
Определенное
возражение против использования автокорреляции – вычислительная сложность алгоритма.
Однако, при эффективном подходе, возможно избежать необходимости вычисления
полной автокорреляции, ограничиваясь только необходимыми участками.
Таким
образом, на выходе системы из МАВ-ФАПЧ и коррелятора получаем значения периода телеметрии и ширины
импульсов. В дальнейшем эта информация передаётся на главную ЭВМ, на которой
происходит пересчет этой информации в
значения датчиков.
Параллельно
с обработкой телеметрии бортовая ЭВМ производит выделение ответа радиозонда
по дальности. Для обнаружения
используется оптимальный корреляционный обнаружитель, следящий за опорной
частотой. Как только опорная частота не обнаружена – считаем, что обнаружен
ответ зонда. Таким образом, происходит обнаружение ответа зонда “от
противного”.
Наиболее
простой корреляционный обнаружитель – некогерентный квадратурный коррелятор.
Достоинства этого метода обнаружения – его простота . Однако это достигается
за счёт сниженной помехоустойчивости.
Более
сложный вариант – когерентный коррелятор. В этом случае используется знание о текущей фазе несущей
для более эффективного обнаружения. При снижении соотношения сигнал/шум может
оказаться более выгодно использовать комбинированный обнаружитель, имеющий
когерентную и некогерентную части. Такой подход даст лучшие результаты,
поскольку точность оценки фазы при низком значении сигнал/шум уменьшается.
Несмотря на лучшие характеристики когерентного
коррелятора, некогерентный квадратурный коррелятор является хорошим вариантом в
случае, когда информация о фазе несущей недоступна.
Общая схема
обработки сигнала представлена на Рис 6.
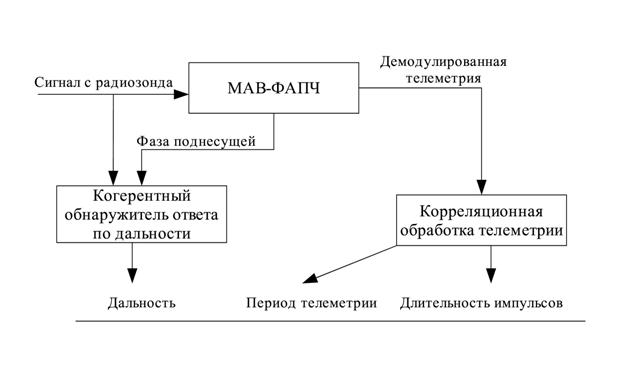
Рис.6 Cхема обработки
сигнала
2.2 Устройство МАВ-ФАПЧ
Одним из наиболее разработанных
методов в теории оценок является метод переменных состояния. Аппарат переменных
состояния разработан как для непрерывной
во времени оценки, так и для дискретной. Общая идея метода состоит в
моделировании исходного сообщения, подлежащего модулированию, окрашенным белым
шумом, пропускаемым через фильтр,
описываемый дифференциальным (непрерывный случай) или разностным (дискретный
случай) уравнением первого порядка. В
нашем случае будем использовать
дискретную модель.
В формальном виде дискретная
модель сигнала выглядит так:
Модель
сообщения: ![]() (3)
(3)
Модель
наблюдения: ![]() (4)
(4)
Здесь используются следующие обозначения:
![]() - наблюдаемый
сигнал
- наблюдаемый
сигнал
![]() - модулирующая
функция
- модулирующая
функция
![]() - аддитивный
белый шум канала передачи
- аддитивный
белый шум канала передачи
![]() - модулируемое
сообщение (в нашем случае последовательность импульсов телеметрии
- модулируемое
сообщение (в нашем случае последовательность импульсов телеметрии
![]() -
вектор-функция описывающая фильтр сообщения
-
вектор-функция описывающая фильтр сообщения
![]() - белый шум,
модулирующий сообщение
- белый шум,
модулирующий сообщение
![]() - матрица
трансформации шума
- матрица
трансформации шума ![]()
Для наших
целей рассмотрим однополюсный линейный
фильтр сообщения с неокрашенным белым шумом на входе.
Перед
обработкой из принимаемого сигнала вычитается несущая частота, в результате
чего получаем две квадратурные составляющие, которые и будем считать
наблюдаемым сигналом. Т.е. модель наблюдения будет иметь вид
 (5)
(5)
здесь
 - фаза частотно- модулированного сигнала,
- фаза частотно- модулированного сигнала,
![]() - аддитивный двухмерный белый шум с дисперсией
- аддитивный двухмерный белый шум с дисперсией![]() .
.
Имея в распоряжении фазу, её
можно использовать для описания частотной модуляции в терминах непрерывных переменных
состояния
![]()
Как видно в
модели задействованы две переменные состояния – сообщение и текущая фаза
сигнала. Использованы следующие обозначения:
![]() - белый шум синтеза сигнала с вариацией
- белый шум синтеза сигнала с вариацией![]() ,
,
![]() - частота среза фильтра сообщения по уровню -3 Дб,
- частота среза фильтра сообщения по уровню -3 Дб,
![]() - ширина спектра ЧМ модуляции.
- ширина спектра ЧМ модуляции.
Можно
показать, что при переходе к эквивалентной дискретной модели, уравнения будут
выглядеть как
![]() (6)
(6)
Здесь  - так называемая переходная матрица системы,
- так называемая переходная матрица системы, ![]() - частота выборки сигнала.
- частота выборки сигнала.
Таким
образом (3) и (4) вместе дают модель
частотно-модулированного сигнала. Функция наблюдения в нашем случае нелинейна,
так что решение в виде фильтра Калмана,
используемое для линейных систем, не
подойдёт. Для получения оптимального решения в смысле максимальной апостериорной
вероятности, необходимо максимизировать
вероятность оценки сигнала при известных наблюдениях![]() . В [2] для приближённого сходящегося решения использован
метод “внедрения вариаций”. После определённого количества выкладок получим
следующий результат
. В [2] для приближённого сходящегося решения использован
метод “внедрения вариаций”. После определённого количества выкладок получим
следующий результат
 (7)
(7)
![]()
 (8)
(8)
![]()

Уравнение (7) описывает
рекурсивный алгоритм оценки модулированного сигнала и фазы. Уравнение (9) есть
не что иное, как алгоритм вычисления коэффициентов усиления ФАПЧ.
Таким образом, уравнения (7)
и (8) описывают алгоритм работы МАВ-ФАПЧ.
Кроме максимизации
апостериорной вероятности можно использовать линеализацию модели наблюдения с
последующим выводом расширенного фильтра Калмана, однако, как показано в [2]
метод МАВ имеет лучшие характеристики.
Более подробно о теории
оценок с помощью метода переменных состояния можно прочитать в [2], [3] и
Ван-Триса [4]. Детальный вывод ЧМ-демодулятора, сделанный в более общей форме,
можно найти в статье [5]. Следует заметить, что в общей форме алгоритм менее
вычислительно устойчив, так как содержит вычисления обратной матрицы.
На Рис .7, представлены
результаты измерений характеристик МАВ-ФАРЧ из
[5]. Для сравнения на
графике изображены кривые для
аналогового ФАПЧ представленного в [5], для разных значений коэффициента
расширения спектра.
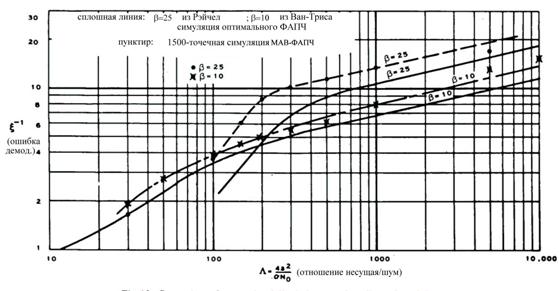
Рис.7 - Ошибка демодуляции МАВ-ФАПЧ
2.3 Обнаружение ответа радиозонда
по дальности
Ответ радиозонда на
зондирующий импульс радара представляет собой замирание поднесущей частоты
сигнала телеметрии. Задача обнаружения такого сигнала сводится к классической
задаче бинарного обнаружения частоты в радиолокации и описана в [4].
Задача рассматривается в
следующей формулировке
![]() - ответа нет
- ответа нет
![]() - ответ есть
- ответ есть
где
![]() - наблюдаемый сигнал,
- наблюдаемый сигнал,
![]() - частота поднесущей,
- частота поднесущей,
![]() - оценка фазовой модуляция сигнала,
- оценка фазовой модуляция сигнала,
![]() - ошибка оценки
- ошибка оценки![]() ,
,
![]() - длительность ответа радиозонда,
- длительность ответа радиозонда,
![]() - мощность принимаемого сигнала,
- мощность принимаемого сигнала,
![]() - аддитивный белый шум с двухсторонней плотностью
- аддитивный белый шум с двухсторонней плотностью![]() .
.
Предположим, что имеется
информация о текущей фазе несущей и функция распределения её отклонения от реального значения (![]() ) имеет вид
) имеет вид
![]() ,
,
где ![]() - модифицированная функция Бесселя первого рода, а
- модифицированная функция Бесселя первого рода, а ![]() - параметр, определяющий рассеяние распределения. Чем точнее
доступные измерения фазы, тем больше значение
- параметр, определяющий рассеяние распределения. Чем точнее
доступные измерения фазы, тем больше значение ![]() . При
. При ![]() распределение
становится равномерным, т.е. это случай когда о фазе никакой информации нет.
распределение
становится равномерным, т.е. это случай когда о фазе никакой информации нет.
При таком предположении о
фазе можно показать, что оптимальной решающей функцией в смысле максимальной
апостериорной вероятности (МАВ) будет
 (9)
(9)
![]()
В уравнении (9) первое
слагаемое представляет собой описание
квадратурного некогерентного коррелятора, в то время как второе есть
когерентная часть. Таким образом, чем больше имеется знаний о фазе
модулированной поднесущей, тем больший вес имеет когерентная часть
обнаружителя. Соответственно при отсутствии информации о фазе (![]() ) остаётся только некогерентная часть.
) остаётся только некогерентная часть.
Значение порога ![]() устанавливается в зависимости
от необходимой достоверности обнаружения.
устанавливается в зависимости
от необходимой достоверности обнаружения.
Для реализации была
использована только когерентная часть обнаружителя с информацией о фазе
поднесущей от МАВ-ФАПЧ на входе. Тем самым фактически сделано предположение,
что фаза нам точно известна. Как показывает практика, в рабочей области системы
учёт неточностей измерения фазы не даёт ощутимых улучшений характеристик
обнаружителя.
2.4 Оценка периода телеметрии
После того как входной
сигнал радиозонда демодулируется МАВ-ФАПЧ в сигнал телеметрии, необходима его
дальнейшая обработка для получения значений периода ![]() и длительности импульсов
и длительности импульсов ![]() телеметрии.
телеметрии.
Для получения эффективного
алгоритма делается предположение, что значения ![]() и
и ![]() изменяются медленно по
отношению к абсолютному значению самого длинного допустимого периода телеметрии
изменяются медленно по
отношению к абсолютному значению самого длинного допустимого периода телеметрии
![]() . Это предположение позволяет априори предположить, что
имеется достаточная статистика о сигнале.
. Это предположение позволяет априори предположить, что
имеется достаточная статистика о сигнале.
Обозначим входной сигнал
приходящий с МАВ-ФАПЧБ как ![]() , где
, где ![]() - сигнал телеметрии, а
- сигнал телеметрии, а ![]() - аддитивный белый шум. Обозначим дисперсию входного шума как
- аддитивный белый шум. Обозначим дисперсию входного шума как![]()
![]() .
.
Рассмотрим автокорреляционную
функцию (АКФ) входного сигнала
![]() ,
,
![]() , (10)
, (10)
где ![]() - время наблюдения.
- время наблюдения.
В дискретном случае с
периодом выборки ![]() , (9) запишется как
, (9) запишется как
![]()
![]() .
.
Так как телеметрия и шум
могут рассматриваться как независимые случайные процессы, то при наличии
достаточно большой выборки, в среднем
автокорреляция их суммы есть сумма автокорреляций
![]()
![]() (11)
(11)
т.е. вклад белого шума будет
виден только в ![]() , остальные значения автокорреляционной функции с шуму не
чувствительны и в точности равны автокорреляционной функции телеметрии без шума
, остальные значения автокорреляционной функции с шуму не
чувствительны и в точности равны автокорреляционной функции телеметрии без шума
![]() (Рис 5). Как
видно из рисунка, функция является периодичной с периодом
(Рис 5). Как
видно из рисунка, функция является периодичной с периодом ![]() и состоит из треугольных
импульсов ширины
и состоит из треугольных
импульсов ширины ![]() .
.
Заметив, что при ![]() случайные величины
случайные величины ![]() и
и ![]() независимы, можно
легко записать формулу для дисперсии
независимы, можно
легко записать формулу для дисперсии ![]()
![]() .
.
Отсюда используя правило
трёх сигм, можем записать порог “шумовых” значений АКФ как
![]() .
.
Для получения ![]() используем формулу
(10)
используем формулу
(10)
![]() ,
,
где ![]() получаем путём
линейной экстраполяции из нескольких первый значений АКФ
получаем путём
линейной экстраполяции из нескольких первый значений АКФ ![]() . Такая оценка возможна, т.к. АКФ телеметрии в районе нуля
есть линейная функция. Используя линейную экстраполяцию АКФ в точку её
пересечения с нулём, получим ширину первого треугольного пика, что даст нам
оценку длительности импульсов телеметрии
. Такая оценка возможна, т.к. АКФ телеметрии в районе нуля
есть линейная функция. Используя линейную экстраполяцию АКФ в точку её
пересечения с нулём, получим ширину первого треугольного пика, что даст нам
оценку длительности импульсов телеметрии ![]() .
.
Далее производится поиск
пика АКФ высоты ![]() между
между ![]() и
и ![]() .
.
Для снижения объёма
вычислений сначала получаем грубую
оценку периода, вычислив АКФ сигнала подверженного перевыборке с периодом ![]() . Имея грубую оценку,
её уточняетм, рассчитав АКФ с большим количеством выборок и найдя её
максимум.
. Имея грубую оценку,
её уточняетм, рассчитав АКФ с большим количеством выборок и найдя её
максимум.
Если по исходному
предположению выполняется (10), это значит, что внутри отрезка наблюдения
имеется существенное количество импульсов телеметрии. Это обстоятельство можно использовать для
улучшения точности оценки периода путём осреднения. В терминах АКФ это
эквивалентно вычислению периода как взвешенного среднего в районе ![]() максимума пика
максимума пика
 ,
,
![]() .
.
2.5. Выводы и пути развития
За счёт использования
приближенных к оптимальным методов обработки сигнала радиозонда, предлагаемая
система позволит снизить требования к
соотношению сигнал/шум в измерительном тракте аэрологического
радиолокатора. Умеренные требования к объёмам вычислений позволяют реализовать
систему на основе современных цифровых сигнальных процессоров общего
назначения.
Кроме улучшенных
характеристик обнаружения, система позволит в большей мере контролировать
качество принимаемого сигнала и качество оценки измеряемых параметров.
Необходимо отметить, что
когерентный коррелятор имеет преимущества перед некогерентным только в
предположении, что фаза колебаний известна достаточно точно. В дальнейшем
планируется получить оценки по порогу соотношения сигнал/шум системы. Это
позволит сделать выбор между когерентным и некогерентным обнаружителем дальности.
Глава 3 . Модернизация программного обеспечения (ПО) МАРЛ-А.
С целью повышения устойчивости и
метрологических характеристик существующего ПО в комплексе МАРЛ-А была
проведена модернизация канала измерения
дальности до зонда. В канале дальности устранены программные ошибки, вызывающие
зависание программного обеспечения в некоторых режимах . Улучшен алгоритм
осреднения отсчетов принимаемых платой
обработки дальности, разработан алгоритм уменьшения влияния отражений от «местных
предметов» на процесс измерения
дальности в ближней зоне.
Разработано новое ПО для управления МАРЛ-А.
Новое программное обеспечение для
управления комплексом МАРЛ-А разработано с целью устранения неполадок возникающих при работе
используемого в первых образцах МАРЛ программного
обеспечения “ЭОЛ” частично унаследованного от ПО “ЭОЛ-АВК”, а также в связи с переходом
на современные компьютерные платформы, не имеющие в своем составе устаревших ISA слотов, использовавшиеся для установки плат ввода
сигналов телеметрии.
Основное отличие нового
программного обеспечения - в модульной архитектуре и возможностью работы на
компьютерных платформах с такими операционными системами как Windows 98, Windows XP и Linux.
Программный комплекс состоит из
четырех модулей-серверов, модуля графического интерфейса и модуля создания
телеграмм из телеметрических данных.
Рис 8. Структурная схема взаимодействия частей ПО
Модуль обработки дальности предназначен
для выделения ответной паузы из сигнала принятого радиолокатором от радиозонда.
В модуле реализован помехоустойчивый алгоритм выделения ответной паузы с
использованием вейвлет-преобразования.
Модуль обработки телеметрии
выделяет из сигнала радиозонда принятого радиолокатором телеметрические данные и сохраняет их для
последующей обработки и создания
аэрологических телеграмм.
Модуль управления двигателем АФАР
передает управляющие сигналы из графического интерфейса оператора в аппаратную
часть управления двигателем.
Модуль управления электронной
частью АФАР предназначен для управления и контроля приемника радиолокатора,
управления передатчиком, распределения фаз фазовращателей АФАР при электронном
управлении ее диаграммой направленности , управление квадрантным сканированием,
управления и контроля радиолокатора в
дальней и ближней зонах.
Модуль
формировния и обработки аэрологических телеграмм выполнен в виде отдельной
программы, что позволяет его использовать не только в составе программного комплекса,
но и как самостоятельную программу для работы с архивами телеметрических
данных.
Графический
интерфейс оператора выполнен в виде отдельного модуля обменивающегося данными с
модулями-серверами при помощи сетевых протоколов, что позволяет его использовать
для наблюдения и управления пуском с удаленного компьютера.
Все
программные модули работают, не зависимо друг от друга. В случае сбоя любого
модуля, программный комплекс не прерывает свою работу и у оператора есть
возможность перезапустить модуль, при этом потеря данных за время сбоя будет не
существенна, и пуск не будет сорван.
Модульная архитектура программного
обеспечения позволяет сохранять полную работоспособность комплекса в случае
модернизации любой из частей радиолокатора путем замены программного модуля
отвечающего за модернизируемую часть. При этом не возникает необходимости полностью
изменять все программное обеспечение, вследствие этого повышается его надежность и устойчивость
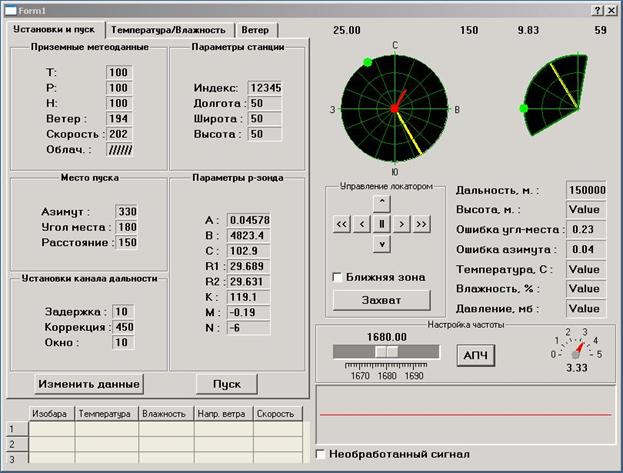
Рис
9.Графический интерфейс оператора.
Глава 4.Разработка методики проверки работоспособности АФАР
радиолокатора МАРЛ-А
В процессе испытаний МАРЛ-А
разработана методика проверки работоспособности радиолокатора, которая
включает в себя методы проверки и ПО, обеспечивающее оценку характеристик АФАР.
Проверка АФАР состоит из получения ее диаграммы направленности, диаграмм
дискриминационных характеристик и
диаграмм записи сопровождения АФАР Солнца.
Для получения данных необходимых для построения диаграмм
необходимо наведя луч ФАР на цель, сканировать этим лучом пространство вокруг
цели таким образом, чтобы в эти данные гарантированно попал центр диаграммы
направленности с окрестностями и данные
об ошибках, полученные в результате квадрантного сканирования. Для построения
диаграммы направленности ФАР использовался сигнал автоматической регулировки
усиления (АРУ) как стандартный для оценки сигнала. Оценка пеленгационных
характеристик проводилась путем сравнения полученных данных с данными,
полученными на модели радиолокатора, построенной в программе MathCAD.
В качестве цели использовались как зонды МРЗ-3, так и
имитаторы зонда, входящие в комплект поставки радиолокатора. Предварительное
сравнение данных показало, что результаты сканирования для зонда и имитатора не
отличаются, поэтому в дальнейшем для проверки ФАР использовался сигнал штатного
имитатора.
На рисунках 10,11
показаны соответственно пеленгационные характеристики по углу места и
азимуту.
|
|
|


Рис.
10 Рис.11
Поскольку ФАР МАРЛ-А
работает в двух режимах, «Ближняя зона» и «Дальняя зона», диаграммы снимались и
для того и для другого варианта. Диаграмма режима «Дальняя зона» задействует все излучатели ФАР, и позволяет
оценить чувствительность ФАР, а диаграмма полученная в режиме «Ближняя зона»
позволяет оценить захват и качество сопровождения непосредственно в момент пуска
зонда. Для получения данных сканировался квадрат вокруг цели, последовательно
направляя луч с шагом 1 градус со стороной 30 градусов, для чего была создана
программы nmp_low для сбора данных и программа nmps для управления ФАР.
Сканированные данные сохранялись во внешнем текстовом файле, после чего
информация импортировалась в MS Excel, и в нем строились объемные диаграммы.
Для комплексной проверки пеленгационных характеристик ФАР а
также для проверки чувствительности приемного тракта локатора использовалась
методика сопровождения Солнца. Для этого после вычисления текущих координат
Солнца на него направлялся луч ФАР и комплекс переводился в режим захвата.
После этого в течении длительного времени проверялись текущие координаты луча,
и в случае совпадения координат с расчетными сопровождение считалось удачным.
Данные сохранялись в текстовом файле, и по ним в дальнейшем строился график
сопровождения Солнца в программе MS
Excel. На Рис.12
приведен пример графика сопровождения Солнца.
Рис.12
Весь комплекс методик был опробован как при проверке
локаторов в ЦАО так и на уже установленных комплексах на аэрологической сети.
заключение
В настоящем заключительном отчете подведены итоги большой научно-исследовательской и опытно-конструкторской работы по проектированию комплекса микроэлектронного аэрологического радиолокатора МАРЛ-А для слежения за шарами-зондами за период 2001 – 2004 г.г. в течении которого были изготовлены опытные образцы основных узлов и блоков радиолокатора, проведены их испытания, разработано программное обеспечение для управления комплексом, первичной и вторичной обработки радиолокационной информации, а также освоено производство серийных образцов МАРЛ-А на Солнечногорском приборном заводе (СПЗ).
В тексте отчета приведено описание устройства, принципа
действия и конструкции микроэлектронного аэрологического радиолокатора МАРЛ-А.
Подробно рассмотрены основные функциональные узлы и подсистемы МАРЛ-А и
структура программного обеспечения. Предложены пути дальнейшей модернизации
МАРЛ-А путем применения современных методов математической обработки видео
сигнала.
Приложения содержат протоколы
испытаний комплексов на полигоне ЦАО и дают информацию о качестве выпускаемой
заводом – изготовителем комплексов МАРЛ-А (СПЗ) серийных образцов. Качество
изготовления на сегодняшний день нельзя признать удовлетворительным. Поэтому потребуется
еще проведение ряда организационных и технических мер для обеспечения требуемой
надежности и повышения эксплуатационных характеристик МАРЛ-А.
Cписок использованных
источников:
[1] Г. Ван Трис. Теория обнаружения, оценок и модуляции. Том
2, "Сов.радио", М., 1975.
[2] Sage, Andrew P., and Melsa, James L. Melsa, Estimation Theory with Applications to
Communications and Control, McGraw- Hilll Book Co., 1971.
[3] A. P. Sage and C. C. I. White. Optimum systems control. Prentice-Hall
Inc., Englewood Clis, N.J., 2nd edition edition, 1977.
[4] Г. Ван
Трис. Теория обнаружения, оценок и
модуляции. Том 1, "Сов.радио", М., 1972.
[5] Alan L. McBride, On Optimum Sampled-Data FM Demodulation, IEEE Transactions on
Communications, no. 1, January 1973 pp.
40-50